図-1
カーナビと相対性理論の関係についての考察
最近巷では相対論による補正が無ければ1日で約11kmのずれが出て使い物にならずカーナビが正常に使えるのは相対性理論のおかげであるというようなデマが蔓延している。
それを真に受けて相対性理論がなければカーナビはできなかったと言う者まで出てくるという由々しき事態になっている。
色々調べてみたところどうやら火元は某大学教授のようです。
疑似科学を相手にしているうちに疑似科学に染まってしまったようです。
名も無い疑似科学者の言動は殆ど注目されませんが、名の通った大学教授が流すデマは信用度が高くここまで蔓延してしまったようです。
カーナビの歴史からはじめることになるとは思いませんでしたが『プロジェクトX』でも取り上げられた開発者の名誉の為にも概略に触れておきます。
まず1981年8月にカーナビの原型となる「ジャイロケーター」がホンダによって開発されました。
これは車に取り付けられた各種センサーからの情報をもとに自車の位置を割り出してブラウン管上の点で表示、その上に地図の印刷された透明なフィルムを重ねるという非常にシンプルなものでした。
地図上で自車の位置が分かれば道に迷わないだろうというコンセプトで開発されたいわゆる自律航法システムで、相対性理論とは一切無縁のものです。
1990年4月にマツダ・三菱が6月にパイオニアから初めてGPSを搭載したカーナビが発売された。
当時衛星の数が少なくて上空に衛星の無い状態が半日近くあった為自律航法との併用で自律航法がメインでGPSは補助的なものでした。
また民生用の信号にはSAという誤差情報が入っていて測位精度が故意に100メートル程度に落とされていたのです。
1993年12月衛星の数が揃い正式運用が開始される。
2000年5月SAが解除され位置精度が飛躍的に向上する。
以上がカーナビの歴史の概略です。
カーナビが正常に使えるのは相対性理論のおかげであるという人たちは誰も言わない事ですが、実は相対性理論による補正をしても1日約26mはずれるのです。
これは原子時計の固有の誤差で計画開始当時衛星に積める最高精度の10-12(およそ3万年に1秒)のもので1日に最大86.4ns(10億分の86.4秒)の誤差が発生します。
補正しないと1日に11kmもずれて使い物にならなくても、補正して1年に10kmずれても使えるのでしょうか。
さらにこの誤差は一律に遅れたり進んだりするものではなく原子時計毎に違っていて進む物もあれは遅れる物やほぼ正確に動く物も有ります。
時間が経過すれば衛星ごとに違う時刻になり位置測定など出来なくなってしまいます。
これは相対性理論による補正を行っていても起こることなのです。
この為、衛星は地上の5ヶ所の基地局で衛星軌道のずれや原子時計の狂いを常に監視されていて軌道情報や原子時計の修正が行われ全ての衛星が同じ時刻になるように調整されている。
地上から時刻の修正をするのだから別に衛星自身で補正をする必要があるのかという事になります。
相対性理論にとって都合の悪いことは言わないんですよ。
現在主張されているカーナビと相対性理論の関係について簡単におさらいしておきましょう。
まずGPS衛星には原子時計が搭載されており常に衛星の位置と時刻の情報が発信されていて電波を受信した時刻と発信した時刻の差に光速度を掛けると衛星までの距離が出ます。
3機の衛星との距離が分かれば受信機の位置が特定されます。
しかし、カーナビの時計は水晶時計で精度が低いためもう1機の衛星の情報を元に正確な時刻を求めています。
4機の衛星からの電波を受信することによって正確な位置と時刻が得られます。
その精度は位置が約10m、時刻は原子時計並になります。
一方衛星の原子時計は上空およそ2万kmを約秒速4kmの速度で地球を周回しているので地上の時計より僅かですが進み相対論による補正を行わないと1日に約38μs(100万分の38秒)ずれてしまいます。
この38μsの時間で光は約11km進みます。
この為相対論による補正をしないとカーナビは使い物にならない。
多少の違いは有りますが以上が疑似科学的相対論者の主張です。
彼らの言う相対論による補正をしなければ1日11kmもずれて使い物にならないカーナビというのは補正をしても1分たつと7km~70kmもずれてしまう始めから使い物にならないカーナビか、衛星に積まれた原子時計かそれ以上の精度の原子時計を搭載した車に乗せられないカーナビなのです。
勘の良い方はもうお解かりかもしれませんが位置測定の時はカーナビの時計は水晶時計で精度が低いと言っておきながら、最後はカーナビの時計が原子時計並の精度で正確な地上の時刻を刻んでいるという前提になっているのです。
また11kmずれるのは衛星と受信機までの距離で三脚の脚の長さが均等にずれるのでそれほど影響は無いはずでカーナビの測定位置が11kmずれるわけでは有りません。
いくつかのサイトでは言及しているのですがカーナビの位置測定の時に計算で出された正確な時刻というのは実は衛星の原子時計の時刻なのです。
カーナビの時計は位置測定のたびに衛星の原子時計の時刻で校正されているのです。
カーナビの時計は衛星の原子時計と同期しているので衛星の原子時計が相対論による補正をされていれば補正された衛星の時刻で、補正が無ければ補正されない衛星の時刻で位置計算をするので相対論による補正は位置精度に何も影響ありません。
カーナビの位置測定でGPS衛星に要求されるのは精度の高い原子時計と全ての衛星の時刻が同期している事だけです。
わざわざ補正して地上の時刻と同期する必要はありません。
カーナビと相対性理論の関係は、携帯と携帯ストラップのようなものです。
あれば便利なストラップも結構ありますがなくても携帯は使えます。
それをストラップがあるから携帯が使えるんだといっているようなものなのです。
巡航ミサイルについては1チップ原子時計を搭載している可能性もあり軍事機密もありますから測位方法がわからないのでなんともいえません。
追記
色々調べているとこの相対性理論による補正というのも怪しいものでGPSシステムの設計者は相対性理論を適用したとは言っていないとの事です。
そもそもGPS研究の権威の学者が相対論者が言う理論値は補正値に近いが一致しないとする論文を出しているそうです。
ここからは推測になりますが、この補正値は事前実験で得られたデーターから導き出されたもので地上の基地局の数を減らすために導入されたのではないかと思います。
実際、常時基地局から校正出来れば衛星に原子時計を積む必要は無く水晶時計でも十分なのです。
現在JAXAの「みちびき」の擬似時計技術として研究されています。
相対論者は、モーターや原発のように後付の説明で相対論の正しさをアピールしたかったのではないかと思われる。
この原子時計のずれに関しても疑問があります。
例えば体重計で体重を量ると赤道では軽くなり緯度が高くなると重くなりますが実際に痩せたり太ったりはしていません。
これは緯度による重力の変化の影響で体重計やばねばかりの特性で、天秤ばかりは重力の変化による影響はありません。
このように原子時計のずれに関しても原子時計の特性で重力の変化によって進んだり遅れたりするものか、実際に時間自体が早くなったり遅くなったりしているのか区別出来るのだろうか。
もう一つ言われている光速度不変の証明になっているという主張に対する考察です。
衛星は上空を高速で移動しているので光速度不変でなければ位置測定は出来ない。
また方向によって光速度が変わっても位置測定できないだからカーナビが正常に作動しているのが光速度不変の証明になっている。
大体こんな感じの主張がなされています。
まず衛星からの電波が衛星の速度に関係なく光速である、これは波の特性で光も波である事からこのことに異議を唱える人はいないと思います。
光速は観測者の速度に関係なく一定であるという相対論の光速度一定について考えて見ます。
奇しくも某教授が解説書の中で音波(正午のサイレン)による位置測定法からGPSの位置測定の仕組みを説明していました。
音波でも理論上同じシステムが組めるのです。
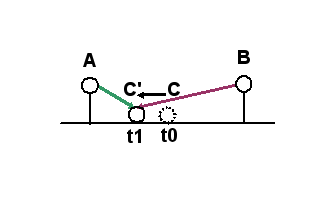
図-1 |
図-1は最も簡単な直線上の位置測定の模式図です。
音源A・Bは固定されていて常に時刻の情報を音波に乗せて発信しています。
受信機Cが時刻t0にAの方向に速度Vで移動しC’でt0に音源Aから発射された音波を時刻t1に受信したとしましょう。
当然AからC’の間は音速です。
A・C’の距離はかかった時間(t1-t0)掛ける音速で計算できます。
当然音源Bからの音波はt0より前の時刻に発信されたものでB・C’間はかかった時間掛ける音速で計算できます。
二つの音源からのそれぞれの距離の交点が受信機の位置になります。
このように受信機が動いていても位置測定は出来ます。
音源が移動している場合、時刻と一緒に音源の位置情報も音波に乗せて発信すれば音波は音源の運動に関係なく音速であるから音源A・Bがそれぞれ音波を発信した時刻に図-1の位置にあればその後どんな運動をしても同じように位置測定が可能です。
平面上の位置測定には3つの音源が、空間内の位置測定には4つの音源が有れば可能になります。
GPSでは3機の衛星で位置測定が出来ると言っていますが、実は3機では交点が2つあり1つは地球上にもう1つは宇宙空間になるため地球上に絞って計算すればいいからです。
このように音波でも理論上GPSと同じシステムが組めるということは、全ての慣性系で速度が一定でなくても正常に作動するシステムになっているのです。
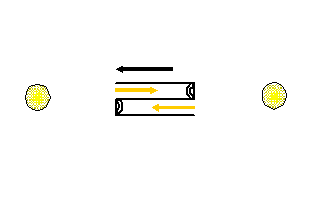 図-2 |
図-2は光速度一定の模式図で筒の先から筒の底までにかかった時間で速度を測る最も簡単な速度計を左右の光源に向けて速度Vで右から左に移動しています。
普通に考えると光に向かって行く筒の方が早く、遠ざかって行く筒の方が遅くなるように思えるのですが、光速は観測者の運動に関係なく一定であるため上の筒も下の筒も先端から底までにかかった時間は同じになるのです。
考え方として運動している筒の慣性系から見ると光源の方が動いていることになり光速は光源の運動に関係なく一定である事から上下の筒とも先端から同じ時間で底に届きます。
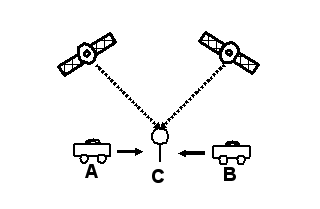 図-3 |
これをふまえて、図-3です。
この図も便宜上直線上の位置測定の模式図です。
左からAが、右からBがそれぞれ速度vで走行してきてCですれ違った時、等距離にある左右の衛星から電波が発射され、時間t秒でCに到着したとします。
この時A・BはCからそれぞれvtだけ離れています。
ここで図-2の速度計の筒の先端がそれぞれ左右の衛星で筒の底が受信機とすると、光(この場合電波)は観測者の速度によらず一定の光速なので、Cですれ違った時に衛星から発射された電波はA・Bの速度に関係なくt秒後にA・Bの受信機に到着することになります。
これで位置計算をすればAもBもC地点に居る事になりそれぞれ距離vt分ずれてしまいます。
速度vが大きくなるほどずれが大きくなります。
奇しくも某教授も言っていますが光の1万分の1の速度でも約2kmのずれが出てしまい使い物になりません。
カーナビが正常に作動しているということは「光速は観測者の速度に依らず一定」ではないということになります。
相対性理論による補正が無ければ使い物にならないといわれているカーナビが、相対性理論の光速度一定を否定しながら日々正常に作動しているのは皮肉としか言いようがありません。
以下は、浅学菲才の身にはどうしても合理的解釈が出来ず、いろんな解説書も見たのですが説明が載っているものは無く取り上げるかどうか迷っていた問題です。
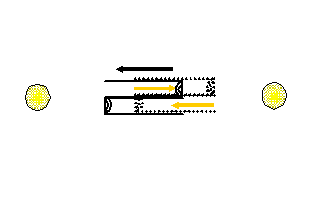 図-4 |
図-4は図-2を光源のある慣性系から見たものです。
光源のある慣性系でも光速は一定なので、当然光源に向かっていく形になる上の筒の方が先に筒の底に到着しその後光源から離れる形になる下の筒の底に光が到着します。
ここで筒の先端に光が入った瞬間に時計のスイッチが入り底の受光部に到着した瞬間に時計が止まる装置を付けると、運動する筒の慣性系では上の筒も下の筒も同じ時間で時計は止まります。
筒の先端から底までにかかった時間は同じなのです。
光源のある慣性系からも当然この時計の表示は観測できます。
これを踏まえて図-4を見てみましょう。
上の筒は速く下の筒はゆっくりと時間が進まなければ上の筒も下の筒も同じ時間になる事は有りません。
1つの慣性系の中に2つの時間の流れが存在するという異常な現象の説明が無いまま、これが正しいと仮定すると色々な事象が矛盾無く説明できるから正しいという論調なのです。
これは光時計の考察でも取り上げていますが、公転速度が秒速約30kmの公転軌道の進行方向にある星からの光も後方の星からの光も光速である事から正しいことが証明されている既成事実で説明の必要はない事なのだそうです。

